

Деформируемый лунный робот «LEV-2» (SORA-Q), совместно разработанный Японским агентством аэрокосмических исследований (JAXA), Takara Tomy Corporation, Sony Group Corporation и Университетом Дошиша, представляет собой компактный лунный робот. десантно-демонстрационная машина «SLIM». Результаты стрельбы обнародованы.
LEV-2 установлен на SLIM вместе со сверхмалым марсоходом для исследования лунной поверхности «LEV-1» для фотографирования SLIM и окружающей среды на лунной поверхности. Были опубликованы изображения, переданные на землю устройством связи LEV-1.
Этот фотографический результат не только подтверждает правильность работы функции связи, но также то, что LEV-2 успешно развернулся и работал на поверхности Луны.Также было обнаружено, что с помощью алгоритма обработки изображений были выбраны и отправлены высококачественные изображения. Другие журналы вождения все еще анализируются.
В рамках совместной разработки четырех сторон группа Sony возглавила разработку системы управления и технологии обработки изображений для лунного робота, используя плату SPRESENSE от Sony Semiconductor Solutions, оснащенную интеллектуальными сенсорными процессорами для Интернета вещей.
Вместе с LEV-1, LEV-2 стал первым в Японии роботом для исследования лунной поверхности, обеспечив первое в мире полностью автономное исследование лунной поверхности и первое в мире одновременное исследование лунной поверхности с использованием нескольких роботов. LEV-2 также стал самым маленьким и легким в мире роботом для исследования лунной поверхности.
Новости

FALCAM, легкая верхняя рукоятка…

RAYQUAL, переходник для крепления на декеле для Nikon Z/Leica L

Hasselblad, модульная беззеркальная камера среднего формата

Мягкий фильтр «Starmist» для выделения звезд

Новая модель зрительной трубы PENTAX «PF-85EDA»

KANI фильтр с эффектом калейдоскопа

DDPAI RANGER, камера для мотоциклов
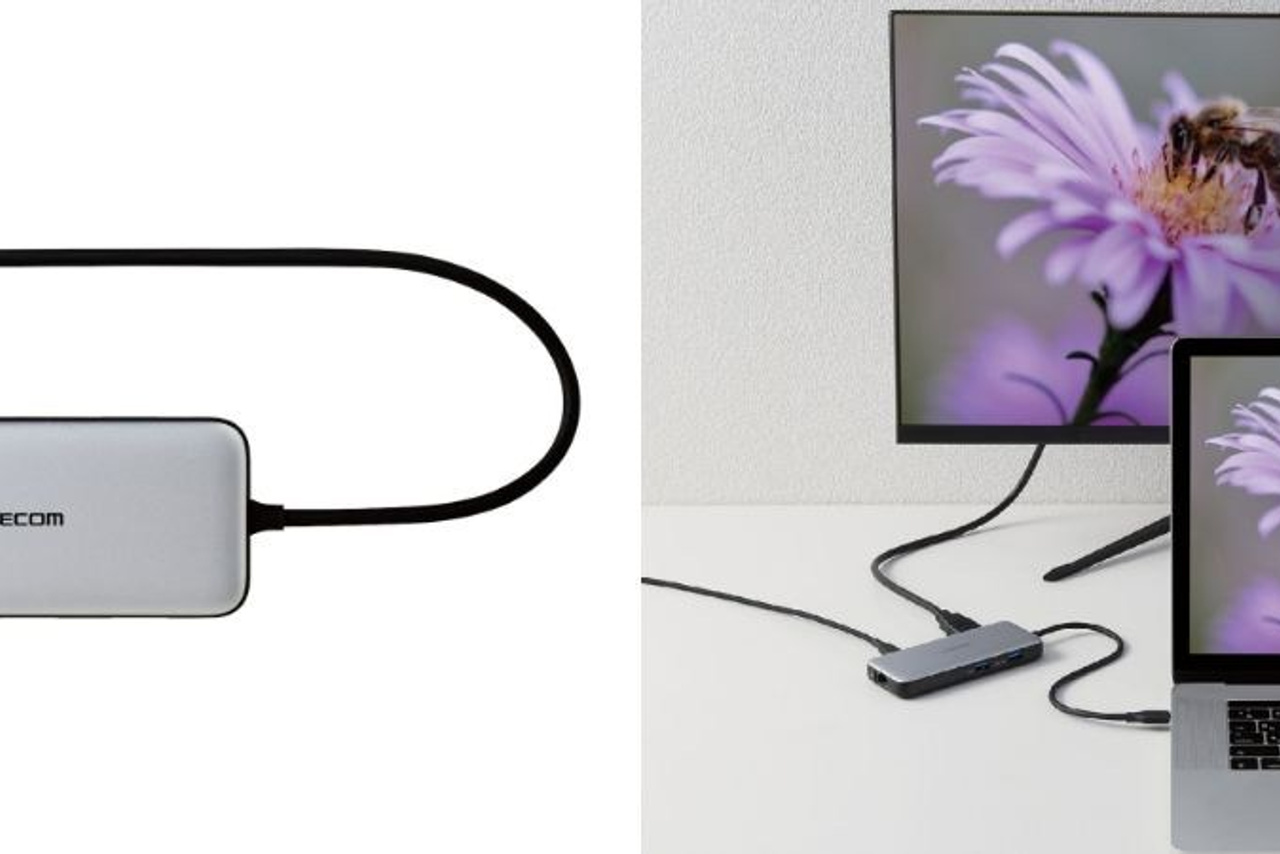
Док-станция USB с выходом HDMI 4K/60 Гц

«XF16-55mmF2.8 R LM WR» был обновлен

Камера для мотоциклов с сенсором Sony STARVIS

DxO добавляет профили коррекции для новых каме

оследняя прошивка для Panasonic LUMIX S1H/S1R/S1/BS1H

KANI добавляет модель с ручкой управления к переменному нейтральному фильтру

Светодиодный светильник Aputure мощностью 600 Вт «LS600c Pro II»
